We are the Machine Learning for Physical Science group, located at the Eindhoven University of Technology. Our group develops advanced computational methods combining Scientific Machine Learning, Deep Generative Modeling, and Deep Geometric Learning to accelerate scientific discovery. We focus on building efficient emulators from synthetic and experimental data, incorporating domain knowledge and physical principles to address challenges in materials science, mechanical engineering, fluid dynamics, and nuclear fusion.
We are pushing the boundaries of deep generative modeling to overcome limitations inherent in scientific computing and the simulation of dynamical systems. Our research focuses on building highly efficient and precise emulators by developing Machine Learning models from both synthetic and experimental data. These emulators empower us to design novel materials with targeted chemical and mechanical properties, model complex pedestrian dynamics, and simulate plasmas within nuclear fusion devices, ultimately contributing to advancements in these respective fields.
A key aspect of our approach is the incorporation of domain knowledge. We leverage known symmetries and physical principles to develop data-efficient and scalable models. Furthermore, we are dedicated to establishing robust, validation methodologies to ensure the reliability and trustworthiness of our solutions.
Soft, porous mechanical metamaterials exhibit pattern transformations that may have important applications in soft robotics, sound reduction and biomedicine. To design these innovative materials, it is important to be able to simulate them accurately and quickly, in order to tune their mechanical properties. Since conventional simulations using the finite element method entail a high computational cost, in this article we aim to develop a machine learning-based approach that scales favorably to serve as a surrogate model. To ensure that the model is also able to handle various microstructures, including those not encountered during training, we include the microstructure as part of the network input. Therefore, we introduce a graph neural network that predicts global quantities (energy, stress, stiffness) as well as the pattern transformations that occur (the kinematics) in hyperelastic, two-dimensional, microporous materials. Predicting these pattern transformations means predicting the displacement field. To make our model as accurate and data-efficient as possible, various symmetries are incorporated into the model. The starting point is an 𝐸(𝑛)-equivariant graph neural network (which respects translation, rotation and reflection) that has periodic boundary conditions (i.e., it is in-/equivariant with respect to the choice of RVE), is scale in-/equivariant, can simulate large deformations, and can predict scalars, vectors as well as second and fourth order tensors (specifically energy, stress and stiffness). The incorporation of scale equivariance makes the model equivariant with respect to the similarities group, of which the Euclidean group 𝐸(𝑛) is a subgroup. We show that this network is more accurate and data-efficient than graph neural networks with fewer symmetries. To create an efficient graph representation of the finite element discretization, we use only the internal geometrical hole boundaries from the finite element mesh to achieve a better speed-up and scaling with the mesh size.
Understanding pedestrian crowd dynamics is a fundamental challenge in active matter physics and crucial for efficient urban infrastructure design. Complexity emerges from social interactions, which are often qualitatively modeled as distance-based additive forces. Endeavors towards quantitative characterizations have been limited by a trade-off between parametric control in laboratory studies and statistical resolution of large-scale real-world measurements. To bridge this gap, we propose a virtual surrogate experimentation paradigm that combines laboratory-like control with real-world statistical resolution. Our approach hinges on a generative simulation model based on graph neural networks, which we train on real-world pedestrian tracking data and validate against key statistical properties of crowd dynamics. Our surrogate experiments not only reproduce known experimental results on collision avoidance, but also reveal new insights into N-body interactions in crowds, which have remained poorly understood. We find that these interactions are topological, with individuals reacting to a limited number of neighbors within a narrow field of view. Our study exemplifies how data-driven approaches can uncover fundamental interaction structures in social systems, even when only uncontrolled measurements are available. This approach opens new avenues for scientific discovery in complex systems where laboratory studies are prohibitive, from crowd dynamics and animal behavior to opinion formation.
Accurately predicting adsorption properties in nanoporous materials using deep learning models remains a challenging task. This challenge becomes even more pronounced when attempting to generalize to structures that were not part of the training data. In this work, we introduce SymGNN, a graph neural network architecture that leverages material symmetries to improve adsorption property prediction. By incorporating symmetry operations into the message-passing mechanism, our model enhances parameter sharing across different zeolite topologies, leading to improved generalization. We evaluate SymGNN on both interpolation and generalization tasks, using samples with varying Si/Al distributions from 108 zeolite topologies for interpolation and assessing generalization on two unseen frameworks. SymGNN successfully captures key adsorption trends, including the influence of both the framework and aluminium distribution on CO2 adsorption. Furthermore, we apply our model to the characterization of experimental adsorption isotherms, using a genetic algorithm to infer likely aluminium distributions. Our results highlight the effectiveness of machine learning models trained on simulations for studying real materials and suggest promising directions for fine-tuning with experimental data and generative approaches for the inverse design of multifunctional nanomaterials.
Highlighted projects
These are some interesting projects we are currently working on. All our projects can be
found
on the Projects page.
Mechanical Metamaterials
Metamaterials are engineered structures whose microscopic geometry gives rise to unusual
properties — such as
tunable stiffness, shape-morphing behavior, or adaptive acoustic response — that don’t
occur in
conventional
materials. Our research focuses on flexible, porous mechanical metamaterials that can
actively
change their
mechanical or acoustic properties when stimulated by mechanical, pneumatic, or magnetic
loading.
Such materials have
potential applications in soft robotics, adaptive structures, and biomedical devices.
Designing these metamaterials is challenging because their behavior involves complex,
nonlinear
deformations and
pattern transformations like buckling. Exploring their vast design space through
traditional
simulations is
computationally expensive. To overcome this, our team is developing machine learning–based
surrogate models,
particularly graph neural networks (GNNs), that can accurately and efficiently predict the
response of metamaterials
with arbitrary geometries. These models capture essential physical symmetries (like
rotation,
scaling, and
periodicity) and can generalize to new designs, enabling faster and smarter discovery of
metamaterials tailored for
specific functions.
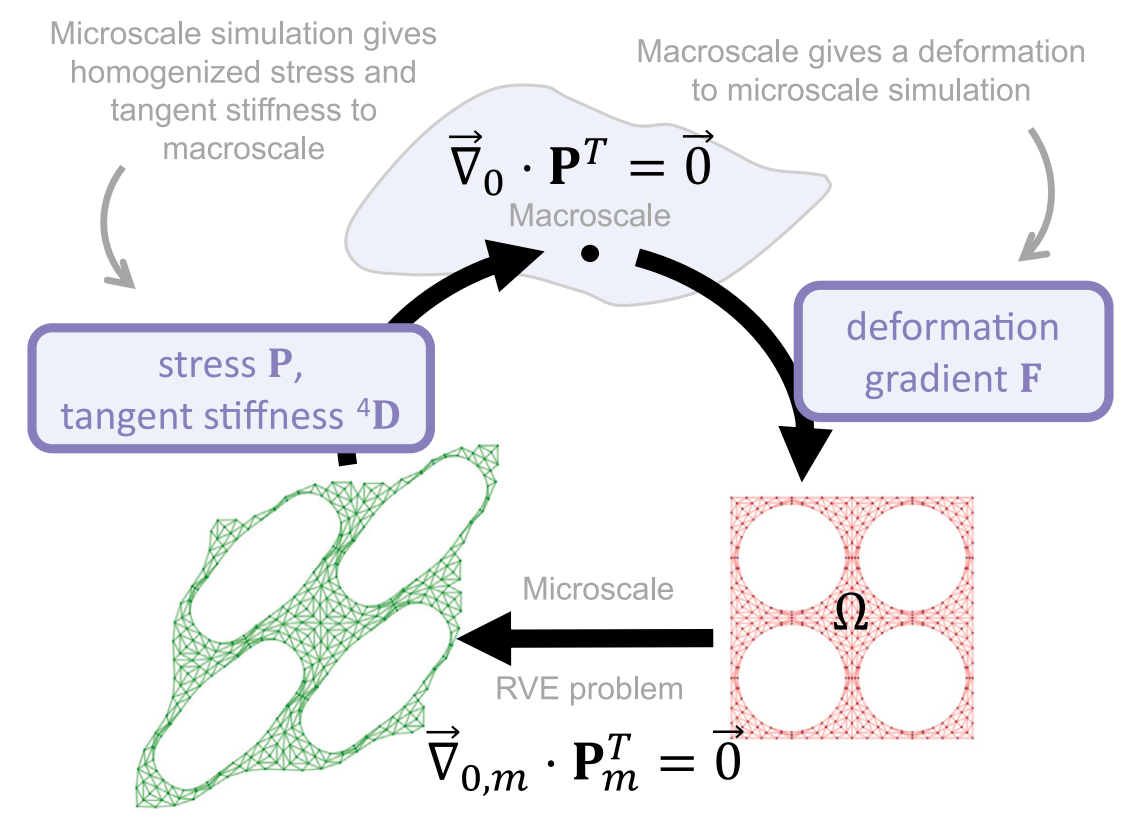
Schematic overview of the first-order computational homogenization procedure from SimEGNN
Buckling behavior of different mechanical metamaterials under compression.
\(\mathbf{F}\)
is the macroscopic deformation gradient.
Pedestrian Dynamics
Understanding how pedestrians move and interact in crowds is both a fundamental problem in
active matter physics and
essential for designing safer, more efficient urban spaces. Traditional studies face a
trade-off
between the control
of laboratory experiments and the scale of real-world observations, limiting our ability to
capture the true
complexity of crowd behavior. Our team bridges this gap through virtual surrogate
experiments
powered by graph
neural networks (GNNs), trained on large-scale pedestrian tracking data.
This approach, realized in our Neural Crowd Simulator (NeCS), reproduces known results in
collision avoidance and
reveals new insights into multi-person (N-body) interactions, showing that pedestrians
respond
primarily to a small
number of nearby individuals within a limited field of view. By combining data-driven
modeling
with physical
interpretability, we uncover the topological nature of social interactions in
crowds—challenging
long-held
assumptions of additive pairwise forces. Beyond pedestrian movement, this framework
demonstrates
how machine
learning can accelerate discovery in complex social and physical systems, from animal
collectives to opinion
dynamics.
Simulation of pedestrian trajectories from NeCS.
Top shows simulation, bottom is ground truth. Only colored trajectories are
predicted, conditioned on neighbouring pedestrians.